![[靈蜂智能官網]-專業(yè)紅外熱像儀廠家](http://linfun.com.cn/wp-content/uploads/2022/06/2022060807191642.png)
![[靈蜂智能官網]-專業(yè)紅外熱像儀廠家](http://linfun.com.cn/wp-content/uploads/2021/10/202110130602107.png)
應用方案—機器人在甘蔗農作物里使用紅外熱像儀實現(xiàn)快速導航
農業(yè)機器人技術面臨的主要挑戰(zhàn)之一是應對不同環(huán)境類型的自主導航。盡管已經為小型露天場所和結構化的室內設施(例如溫室和苗圃)合理地提出了該問題的幾種解決方案,但是對于大型非結構化且密集的草類作物(例如甘蔗、小麥、玉米、大麥)環(huán)境而言卻難以解決。因為與普通的農田不同,甘蔗農場通常是廣闊的,可容納許多密集且難以接近的排田隧道。此外,甘蔗作物處在惡劣的地區(qū),這阻礙了雇用人員和重型機械進行制圖,監(jiān)測和取樣的后勤工作。
一般用于農作物的機器人為智能生物能源農業(yè)坦克,旨在甘蔗田中執(zhí)行許多農業(yè)任務。但是該機器人的導航問題尤為突出,例如(i)需要穿越狹窄的農作物走廊,地形不平坦,葉子被困,GPS覆蓋率差并且難以解釋RGB相機或激光器的數(shù)據;(ii)盡管存在非完整系統(tǒng)的運動控制和路徑規(guī)劃方面的相關研究,但由于該行駛曲線需要滑移現(xiàn)象,因此滑移效應分析尚不成熟;(iii)基于其低成本的設計理念,導致了有限的硬件和處理能力。
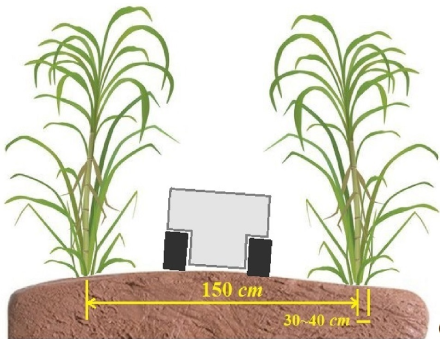
圖為智能生物能源農業(yè)坦克
在這項工作中,挪威生命科學大學科學技術學院的科學家為在甘蔗農作物中運行的移動機器人開發(fā)了基于紅外熱成像的導航方法。關鍵思想是結合運動學建模方法、機器人定位技術、紅外熱成像技術、軌跡規(guī)劃算法和運動控制策略等不同的學科領域,創(chuàng)建一種自主導航解決方案,以確保成功執(zhí)行農業(yè)領域的監(jiān)視任務。紅外熱圖像提供易于檢測的功能,它可以檢測從物體自然發(fā)出的熱輻射,因此可以分配主動源,將熱能傳輸?shù)侥繕耍瑥亩鴾p輕了基于激光的制圖所帶來的生命危險。與匹配的RGB圖像相比,能夠收集更多的現(xiàn)場數(shù)據,以幫助我們更好地了解不同的日光/天氣條件(例如,夜晚,雨天,霧天,季節(jié))下的環(huán)境熱剖面,并繪制土壤和作物之間熱對比度差的組合圖。通過從現(xiàn)場收集的熱圖像和數(shù)值模擬推斷出生成的路徑進行驗證和確認。具有更高的可靠性。在甘蔗作物中進行的初步實驗測試也說明了所建議的導航方法的效率和可行性,該方法由不同的實施階段組成。

圖為機器人拍攝的紅外圖像和彩色圖像
參考資料:
Marco F. S. Xaud1, Antonio C. Leite and Pal J. From. Thermal Image Based Navigation System for Skid-Steering Mobile Robots in Sugarcane Crops [C]. 2019 IEEE International Conference on Robotics and Automation (ICRA). 2019.